

机床的上下料可以使用桁架机械手在自动流水线上实现
来源:www.hbh-robot.com 发布时间:2024年06月19日
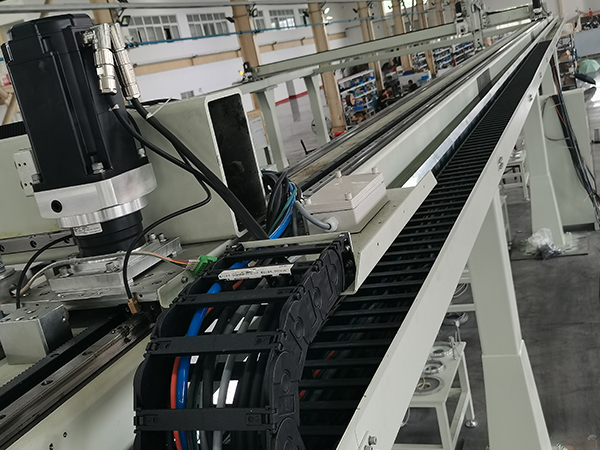
在工业自动化生产线中,工件必须经常在流水线和机器加工站之间来回移动。目前,机床的上下料都是在自动流水线上实现的,通用桁架式上下料机械手得到广泛应用。桁架机械手是一种高自由度机器人。桁架机器人包括安装在横梁上的水平运动部件和垂直安装在水平运动部件上的垂直运动部件。垂直运动总成的下部连接了一个定制夹具,水平运动总成和垂直运动总成分别含有齿轮和齿条导轨进行传动,齿轮和齿条导轨设计成斜齿相啮合彼此。那么在设计桁架机械手时应该注意什么呢?
桁架机械手的设计要点:
1、桁架式机械臂的结构应考虑各关节的限位开关和具有相应缓冲能力的机器限位块,以及驱动装置、传动机构等部件的安装。
2、全自动桁架机械臂各关节轴尽量相互平行;相互垂直的轴尽量相交于一点,这样可以简化机械手运动学的正向和反向计算,便于机械手的控制。
 3、桁架机械手的臂相对于其共同的旋转轴应尽量保持重量平衡,这对减轻电机负载和提高机械手臂运动的反应速度很有好处。在设计桁架机械手的手臂时,应尽可能利用安装在机械手上的机电元器件的自重来减小机械手手臂的不平衡重量,并对剩余的不平衡重量设计平衡机构以达到平衡。平衡。必要时手臂的重量。
3、桁架机械手的臂相对于其共同的旋转轴应尽量保持重量平衡,这对减轻电机负载和提高机械手臂运动的反应速度很有好处。在设计桁架机械手的手臂时,应尽可能利用安装在机械手上的机电元器件的自重来减小机械手手臂的不平衡重量,并对剩余的不平衡重量设计平衡机构以达到平衡。平衡。必要时手臂的重量。
4、减少摩擦作为机器人机械手的工作条件之一,桁架机械手也应尽可能减少机械间隙带来的运动误差。因此,在设计桁架机械手时,机械手各关节的承载距离应尽可能远。它可以很小,每个关节都应该有一个可靠且易于调整的轴承间隙调节机构。
5、龙门桁架机械臂的结构尺寸应满足机械手工作空间的要求。工作空间的形状和大小与机械臂的长度和臂关节的转动范围密切相关。但是,桁架机械臂末端的工作空间考虑了腕关节的空间姿态要求。如果对手腕姿势提出具体要求,则手臂末端可达空间小于上述工作空间,未考虑手腕姿势。
6.在保证机械臂有足够的强度和刚度的情况下,尽量在结构和材料上减轻机械臂的重量。力求使用高强度轻质材料,通常采用高强度铝合金制造机械臂。从而提高了桁架机械手的运动速度和控制精度。
桁架机械手的设计要点:
1、桁架式机械臂的结构应考虑各关节的限位开关和具有相应缓冲能力的机器限位块,以及驱动装置、传动机构等部件的安装。
2、全自动桁架机械臂各关节轴尽量相互平行;相互垂直的轴尽量相交于一点,这样可以简化机械手运动学的正向和反向计算,便于机械手的控制。
4、减少摩擦作为机器人机械手的工作条件之一,桁架机械手也应尽可能减少机械间隙带来的运动误差。因此,在设计桁架机械手时,机械手各关节的承载距离应尽可能远。它可以很小,每个关节都应该有一个可靠且易于调整的轴承间隙调节机构。
5、龙门桁架机械臂的结构尺寸应满足机械手工作空间的要求。工作空间的形状和大小与机械臂的长度和臂关节的转动范围密切相关。但是,桁架机械臂末端的工作空间考虑了腕关节的空间姿态要求。如果对手腕姿势提出具体要求,则手臂末端可达空间小于上述工作空间,未考虑手腕姿势。
6.在保证机械臂有足够的强度和刚度的情况下,尽量在结构和材料上减轻机械臂的重量。力求使用高强度轻质材料,通常采用高强度铝合金制造机械臂。从而提高了桁架机械手的运动速度和控制精度。
上一条
没有了
下一条
桁架机械手是如何上下料的
返回列表
【相关文章】






联系人:杨总
联系电话:13986388432
联系人:李总
联系电话:15971052931
备案号:鄂ICP备18008820号
地址:湖北省襄阳市高新区汽车工业园新光路1号2幢
声明:部分素材来源于网络,如有侵权,请告知我们删除!
